특정 과학기술에 대해서, 「아마리에도 깊게 들어가는 면이 있을지도 모르므로, 단지 「세상은 이렇게 돌아가고 있구나」정도로 읽어 주시면 감사합니다」실은 아무도 읽지 않는 것을 알고 있다.
슬램.Simultaneous Localization and Mapping 직역시적 위치추적 및 지도작성
미국에 갔을 때 너무 큰 대학에서 길을 잃은 적이 있다.
그때 내가 어떻게 길을 찾으려고 노력했던가.그러자 돌아다니고 있었지만 이미 지나가던 건물을 중심으로 길을 찾아 그렇게 바른 길을 빠져나올 수 있었다.
위의 예시처럼 무인도에 떨어졌거나 길을 잃은 상황을 고려할 때 로봇에 전원이 켜져 현재 위치를 추정하라는 Task를 부여받는 상황과 비교해 볼 때 상당히 비슷하다.
SLAM은 카메라(또는 카메라와 같은 센서를 가진 로봇)를 이용하여 주변 환경을 실시간으로 촬영하여 3차원 모델로 복원하는 동시에 3차원 공간상에서 로봇의 위치를 추정하는 기술을 말한다.
이는 증강현실 로보틱스 자율주행 같은 응용에서 필수적이다.
인기글




SLAM의 알고리즘은 크게 front-end와 back-end로 나뉜다.
front-end는 센서로부터 측정된 데이터를 3차원 point cloud로 만드는 과정이다.
back-end는 Loop Closure dectection, 환경맵 최적화 과정을 수행한다.
이는 로봇(편안하게 그냥 카메라 로봇 대신)의 이동 궤적상에서 현재 위치가 이전에 방문한 위치인지를 판단하는 것으로 SLAM 알고리즘의 로봇 표류 문제를 해결하기 위해 중요한 요소이다.
이를 위해서는 동일 화면(Scene) 또는 동일 객체(Object)의 서로 다른 영상 간의 관련성을 찾아 매칭하는 기술이 반드시 필요하다.
영상을 여기저기 스케일의 변화, 회전해 매칭하는 기술인 Scale Invariant Feature Transform(SIFT) 알고리즘과 Integral Image를 이용한 Convolution 연산과 Fast Hessian Detection이 가능한 Speed Up Robust Feature(SURF) 알고리즘이 개발되었다.
아무튼 다시 돌아와서
위의 사진은 Visual SLAM을 실시한 결과를 나타내고 있다.
푸른 사각형 카메라, 가운데 테이블은 아마 실험실 내부일 것이다.
정말 훌륭하게 3d를 구현했음을 확인할 수 있다.
출처 : https://youtu.be/ufvPS5wJAx0
SLAM의 특징 : 카메라가 1초에 30회 수행한다면 33ms 내에서 연산을 수행해야 하므로 알고리즘이 쉽게 말하면 ‘무겁지 않은’ 속도와 성능에 대한 트레이드오프에 관한 문제이다.
하지만, 문제가 생겨도 강인하게 돌아올 수 있는 robustness도 갖추고 있어야 하며, 카메라의 성능은 동일하다면, 하드웨어의 성능이 중요하다.
그래서 내가 풀고 싶은 문제, 내가 사용하고자 하는 카메라 하드웨어, 프로세서 하드웨어에 대해서 깊이 생각해 보아야 한다.
뭐가 되든 힘들다는 거네…
SLAM과 혼동되는 기술이 몇 가지 있다.
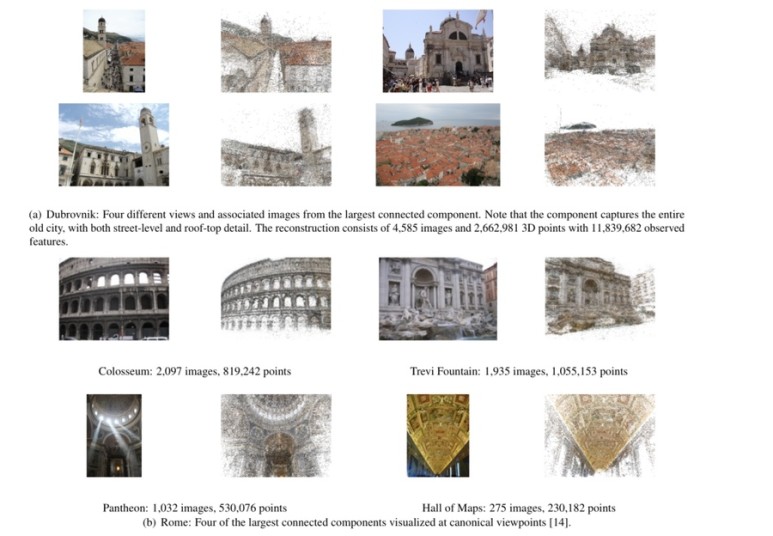
Structure from Motion (SfM): 시간 제약이 없는 SLAM 3d model이 output로 나오는 SLAMBuilding Romeinaday 논문

수천 장의 사진에서 3d로 구현하는 기술이다.
Visual Odometry : SLAM의 subset 이전 위치에 비해 나는 지금 어디에 있는지를 지속적으로 관찰. Path Planning 지도가 있을 때 임의의 두 지점의 경로를 짜는 것.Map이 Point cloud형태로 되어있다.
자율주행, 로보틱스, AR, VR에 사용되는 이 SLAM은 어떻게 분류되는지, Visual-SLAM: 카메라를 이용하는 Monocular SLAM(단) Stereo(양안)/RGB-D(Depth 정보를 이용, Intel Real-Sense Camera) 요구하는 하드웨어, 들어오는 데이터, 사용하는 알고리즘 모두 다르다.
장점은 싸다는 점이다.
Visual-Inertial SLAM 관성측정장치(IMU)를 사용하여 curvy한 카메라경로도 측정한다.
LidarSLAM/GPS3d의 경우 양산이 용이하지 않다.
GPS와 접속해 사용하는 것, 자연스럽게 지하 주차장 같은 곳에서는 사용할 수 없다.
단점은 무겁고 파워선도 넣어야 한다.
Sensor Fusion 상의 센서를 섞는다.
자율주행은 정확한 Localization이 요구되기 때문에 연구가 많이 이루어지고 있다.
결론:오늘도 내가 오늘 공부한 것을 썼는데, 결국 SLAM이 어느 정도 연구되고 활용 방법이 무엇인가가 중요하다.
https://rpm.snu.ac.kr의 링크에 접속하면 서울대 연구실도 확인할 수 있다.
부동산에 나온 매물을 Visual-SLAM으로 촬영해 이를 VR/AR 기술로 남에게 보여주는 기술도 가능해 보인다.
현재 연구가 집중되어 있는 분야뿐만 아니라 이러한 상업적인 접근도 가능하게 하는 매우 놀라운 기술이라고 생각한다.
#공학부 #기계공학과